Student name:
Yair Prayev
LeonYoffe
Ruti Uzan
Department:
SystemsEngineering
Advisor name:
Dr. Shmuel Shelef
2014
--
2
A
utonomous
G
round
A
ir Team
MobileBorder ProtectionSystem
KeyRequirements
• Visible presence in the area.
• Observe defined areaand recognize changes.
• Detect, classify and identify human and vehicle.
• Maintain continuous visual contact.
• Engage identified and designated threat (CEP5m).
Constraints
• Use Unmanned Aerial Vehicle
(UAV) of typeMD4-1000
Requirements
Functional
• Identify human/vehicle in the range of at least 250/800m
• Real time picture to the Command control and
communication center (C3).
Non-
Functional
• The solution based on the autonomous cooperation and operation between a
quadracopter (UAV) and anunmanned ground vehicle (UGV), controlled byC3.
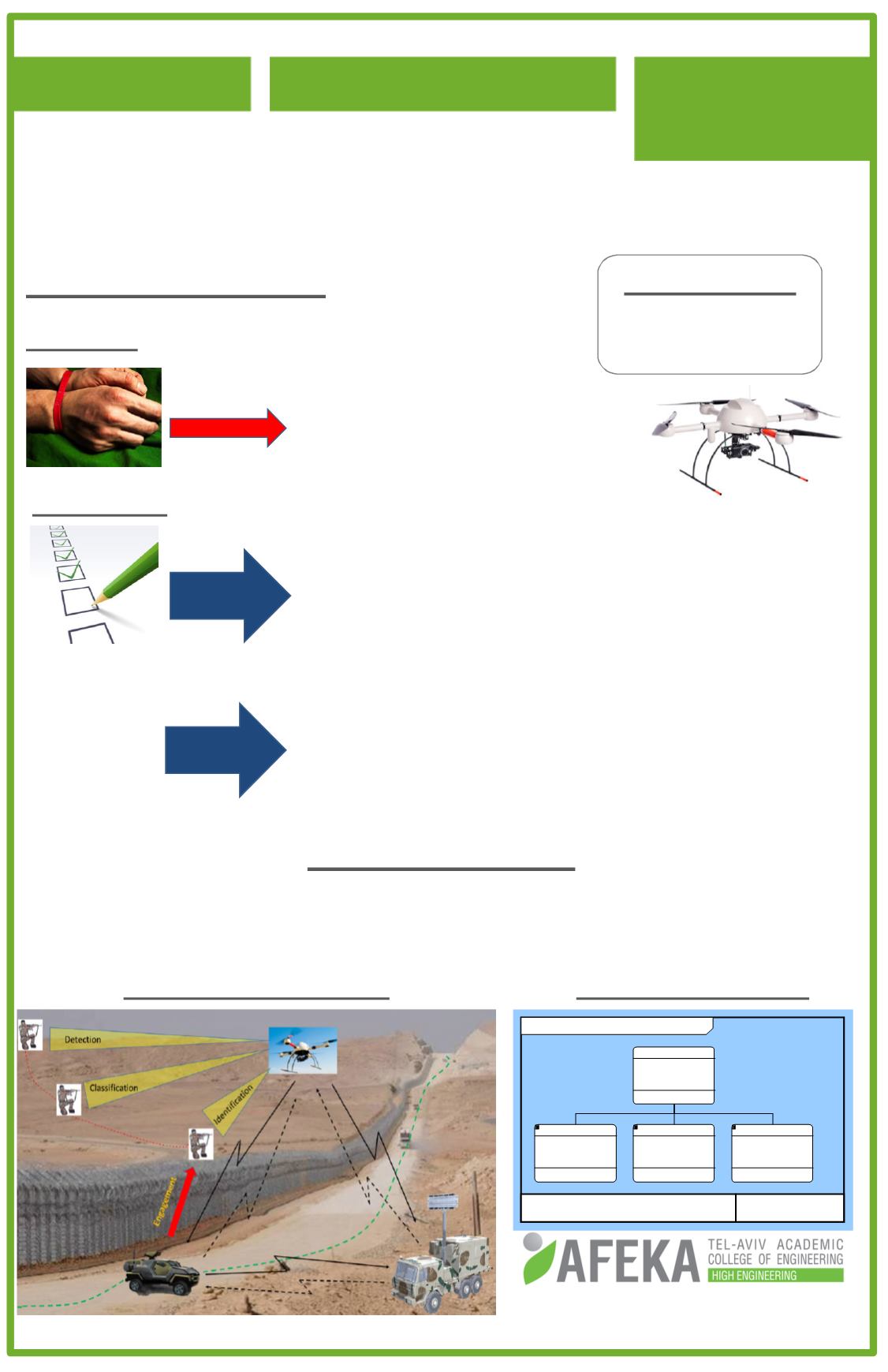
SystemConcept
1
AGA-team border
protection system
Component
1.1
UAV - md4-1000
Component
1.2
UGV
Component
1.3
C3
Component
hier AGA-team border protection system
University Edition - For Academic Use Only
Date:
27 February 2014
Top level block diagram
SystemConOps Illustration
Stakeholders
• MOD
• IDF


